Pour mon premier montage Arduino, j'ai choisi utile pour protéger mes poules des prédateurs founine, renard ou autre opportuniste genre rat qui viendrait les traumatiser. Le montage fonctionne sans problčme depuis mai 2015, avec quelques améliorations depuis, il est, je pense, maintenant au point. n'hésitez pas ŕ apporter vos critiques ou réalisations.
schéma ( version ŕ détection par photorésistance )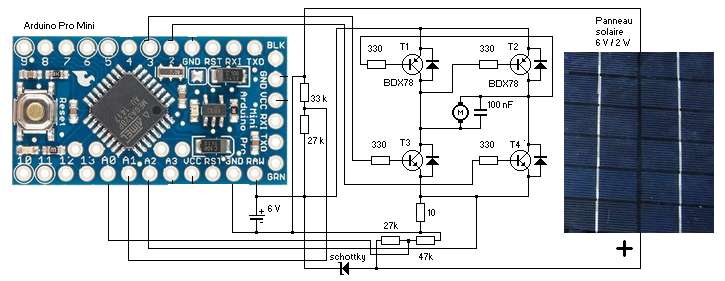
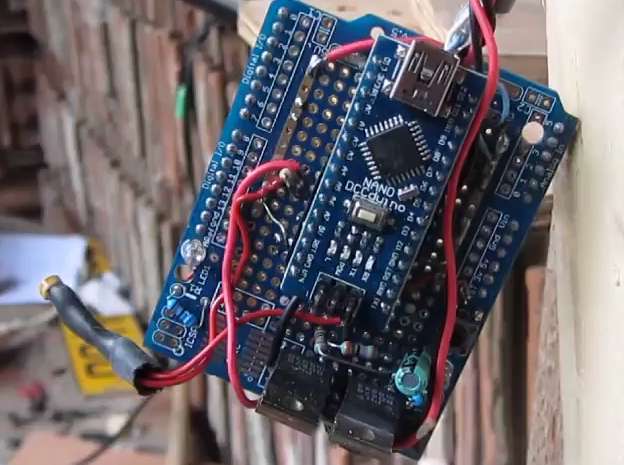
Petite vidéo lors des tests avec arręt sur blocage moteur et Arduino Nano
Aprčs cela, l'Arduino Nano a été remplacé par un Pro mini pour consommation en veille 0.4 mA.
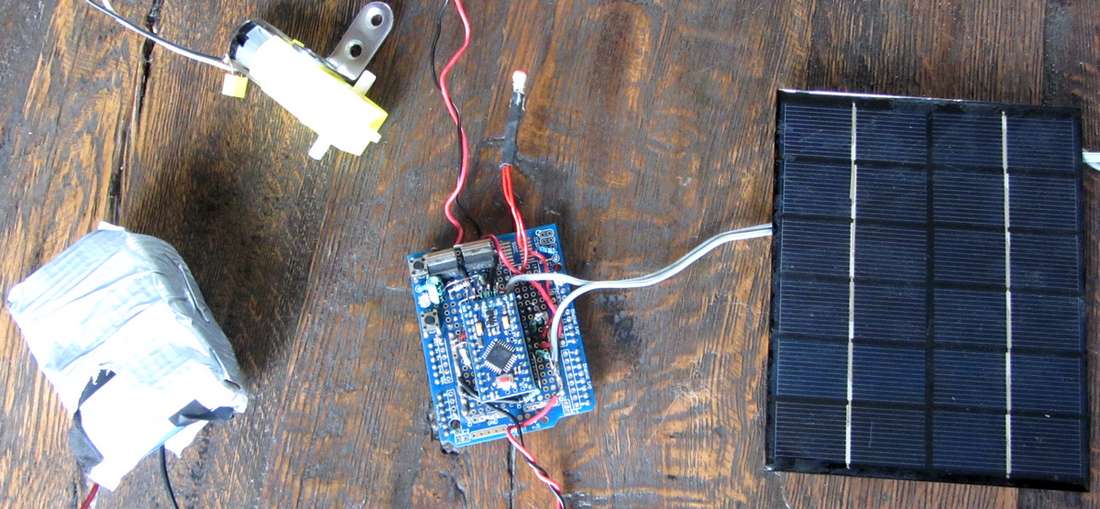
La batterie de 6 V 2 Ah nécessitait d'ętre rechargée chaque semaine et maintenant tiens 5 semaines.
Je ne la recharge désormais plus, le panneau solaire s'en charge.
La tension aux bornes du panneau solaire donne le niveau de luminosité au microprocesseur(µp). Au seuil "nuit", la trappe se ferme environ 1/2 heure aprčs l'heure normale ou les poules rentrent. Quand la trappe est fermée, le moteur se bloque. Son courant est limité par une résistance de 10 ohm, qui en męme temps indique au µp le blocage. Au bout du délai programmé, le moteur s'arręte. Le µp entre en mode veille, se réveille toutes les 8 secondes et attends le seuil jour. A l'aube, l'ouverture se fait au bout de 15 périodes de veille, environ 2 minutes, qu'on peut augmenter avec la variable "nbCycle" si des éclairages artificiels intempestifs risquaient de déclencher l'ouverture prématurément. Une butée bloque la trappe une fois ouverte. Si la tension de batterie descends en dessous de 5,5 V, la LED du module pro mini flashe toutes les 8 secondes.
Le systčme fonctionne avec une batterie de 6 V NIMH. Il consomme 10 mAh par jour. Tous les paramčtres sont modifiables par programmation.
Un panneau solaire 6 V 2 W a été ajouté pour recharger la batterie. Avec le peu de consommaton du montage,un éclairage led pourra aussi ętre alimenté.
Une diode schottky évite que la batterie ne se décharge quand sa tension est supérieure ŕ celle du panneau. Une résistance de 100 ohm limite le courant, surtout en fin de charge
La photorésistance sort ŕ l'extérieur dirigée vers l'ouest au soleil couchant.

J'ai des Marans, ce sont des petites poules. Le trou dans la paroi fait L = 20 cm; h = 25 cm, la trappe 22 X 30 en plastique de 3 mm d'épaisseur taillé dans ce qui devait ętre un panneau publicitaire. Du contreplaqué de 5 mm ou męme une tôle galva doit convenir. Un surpoids peut ętre résolu par un contrepoids sur une poulie ou au bout d'un bras levier.
Nouvelle trappe en tôle galva, plus solide avec butée en bas et arrondie pour ne pas blesser. poids = 300gr, pas en besoin de contrepoids


Pour verrouiller la porte, il fallait un entrainement rigide en fermeture.
Un tube métallique de 8 mm de diamčtrer adapte la vitesse de rotation du moteur, environ 150 tr/mn ŕ la force nécessaire pour déplacer la trappe. Le côté moteur est pincé ŕ l'étau pour s'adapter ŕ l'embout de l'axe du moteur. L'autre extrémité s'adapte ŕ un roulement ŕ bille incrustré dans un flasque récupéré sur un moteur Hs. Le tube est percé de deux trous pour fixer la ficelle par des noeuds ŕ l'interrieur du tube.
La ficelle tourne autour d'une poulie 35 cm plus bas et le ressort (2 ensembles pour plus de force) la maintien tendue. Le domino sert ŕ relier la ficelle ŕ une tige d'acier rigide qui entraine la trappe.

En descente, le moteur est bloqué par une butée plus basse que le bas du trou, empęchant les éventuels prédateurs d'avoir prise pour la soulever.
J'ai ajouté une vis pour la butée haute stoppant l'ouverture.

Pour le protéger et voir un éventuel défaut, le systčme est entouré d'un cadre en bois de palette et recouvert d'un plexiglass.
Rien de secret, vous pouvez le modifier ŕ votre guise.(télécharger pour avoir le programme complet)
/* Trappe automatique poulallier avec Arduino Pro Mini Arret sur blocage moteur sans contacts de fin de course. Panneau solaire pour la recharge de la batterie. Si la batterie est faible, la led du circuit s'allume 300 ms toutes les 8 secondes. */ #include#include #include volatile int f_wdt = 1; /* declaration des constantes pour les noms des broches */ const int led = 13; // led du module nano const int pinmoteur = A2; // mesure courant moteur const int fermer = 2; // commande de fermeture const int ouvrir = 3; // commande d'ouverture const int bat = A1; // surveillance tension batterie const int pinpanneau = A0; // surveillance tension panneau /* declaration des variables */ int niveau_bat;// int nuit = 20; // seuil nuit int jour = 185; // seuil jour int panneau; // luminosité panneau int courant_moteur; int retard = 0; // évite de déclencher sur variation de luminosité brčve int nbCycle = 15; // retard ŕ l'ouverture X 8 secondes(2 mn pour 15) boolean trappe; // état trappe boolean rotation = 0; // moteur arręté unsigned long debut_blocage; // début du blocage int mem_courant; // courant moteur au début du blocage int delai_blocage = 100; void setup() { // initialisation des broches entree/sortie pinMode(pinpanneau, INPUT); pinMode(bat, INPUT); pinMode(fermer, OUTPUT); pinMode(ouvrir, OUTPUT); pinMode(pinmoteur, INPUT); pinMode(led, OUTPUT); panneau = analogRead(pinpanneau); // Pour forcer la trappe ŕ se fermer la nuit ou ŕ s'ouvrir le jour. if (panneau > nuit) {//jour trappe = 1; // fermée } if (panneau < nuit) { trappe = 0; // ouverte } // active le compteur watchdog pour interruption toutes les 8 secondes setup_watchdog(9); } void loop() { // LDR = analogRead(pinldr); panneau = analogRead(pinpanneau); niveau_bat = analogRead(bat); switch (rotation) { case 0 : // moteur arręté if (panneau > jour) { // jour switch (trappe) { case 0 : sommeil(); break; case 1 : retard++; ouverture(); break; // pas ouverte } }//jour if (panneau < jour) { retard = 0; // éclairage momentané } if (panneau < nuit) { switch (trappe) { case 1 : sommeil(); break; // fermée case 0 : fermeture(); break; } }; break; case 1 : // moteur tourne courant_moteur = analogRead(pinmoteur); if (courant_moteur != mem_courant) { // normal // sauve le courant moteur et debute le comptage mem_courant = courant_moteur; debut_blocage = millis(); } // arret moteur si courant moteur invariable depuis delai_blocage if (courant_moteur == mem_courant) { // bloqué if ((millis() - debut_blocage) > delai_blocage) { // bloqué et délai dépassé stop(); } }; break; }// fin switch rotation }// fin de loop() // Watchdog Interrupt Service est excite lors d'un timeout du WDT ISR(WDT_vect) { if (f_wdt == 0) { f_wdt = 1; // flag global } } } void setup_watchdog(int ii) { byte bb; int ww; if (ii > 9 ) ii = 9; // pour 8 secondes bb = ii & 7; if (ii > 7) bb |= (1 << 5); bb |= (1 << WDCE); ww = bb; // Clear the reset flag MCUSR &= ~(1 << WDRF); // start timed sequence WDTCSR |= (1 << WDCE) | (1 << WDE); // set new watchdog timeout value WDTCSR = bb; WDTCSR |= _BV(WDIE); } // active la mise en veille pour 8 secondes void sommeil(void) { // témoin led si la tension de batterie < 6 V if (niveau_bat < 565) { // 5.6 V digitalWrite(led, 1); delay(300); digitalWrite(led, 0); } set_sleep_mode(SLEEP_MODE_PWR_DOWN); sleep_enable(); sleep_mode(); //Entre dans le mode veille choisi //le micro passe en sommeil pour 8 secondes sleep_disable(); // Le programme va reprendre ici aprčs le timeout du WDT } void ouverture() { if (retard > nbCycle) { // environ 2 minutes digitalWrite(ouvrir, 1); digitalWrite(fermer, 0); rotation = 1; retard = 0; } else { sommeil(); } }; void fermeture() { digitalWrite(ouvrir, 0); digitalWrite(fermer, 1); rotation = 1; }; void stop() { digitalWrite(ouvrir, 0); digitalWrite(fermer, 0); trappe = !trappe; rotation = 0; sommeil(); };